Ball caster yang terlihat dalam gambar diatas merupakan roda bebas sebagai penopang chassis bersama-sama dengan kedua motor dc. Sebagai driver motor saya menggunakan IC L293D. Mula-mula kita pasang terlebih dahulu IC L293D pada breadboard berukuran mini (memiliki 170 lubang).

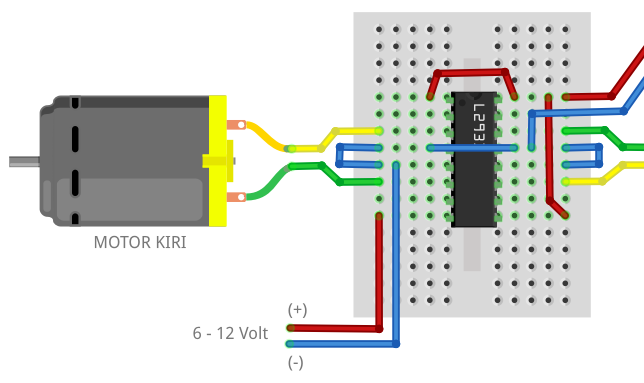
Setelah itu memasang kedua motor dengan memakai kabel jumper.

Berikutnya adalah melaksanakan pengawatan untuk jalur catudaya, baik catudaya untuk IC L293D maupun catudaya untuk kedua motor dc.

Lakukan pemeriksaan ulang untuk memastikan bahwa hubungan kabel-kabel jumper sudah sesuai dengan skema rangkaian. Jika sudah benar, anda bisa memasang kabel-kabel jumper untuk input ke board Arduino.

Hubungkan kabel-kabel input tersebut ke pin-pin digital pada Board Arduino. Disini saya menggunakan Board Arduino UNO R3.

Terakhir adalah mengatur letak breadboard.

Tertarik untuk mencobanya?