Nomor Urut Kaki IC L293D
Ketika hendak memakai IC L293D sebagai driver motor, hal pertama yang harus diperhatikan adalah nomor urut dari kaki-kaki (pin) yang ada. Anda bisa perhatikan tanda noktah untuk pin nomor 1 dari IC L293D.
Memasang L293D pada Breadboard
Setelah yakin dengan nomor urut kaki-kakinya, sekarang IC L293D bisa dipasang pada breadboard.
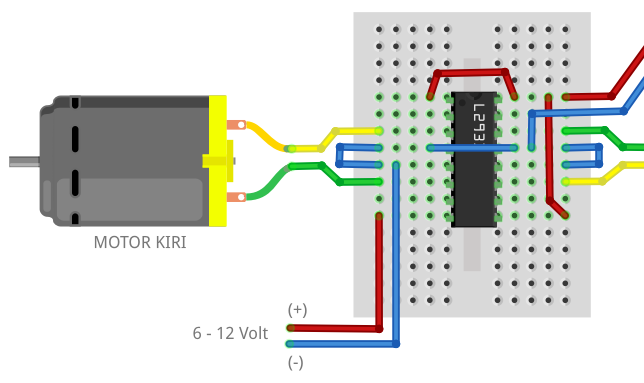
Memasang Motor
Selanjutnya bisa dipasang motor sebagai penggerak roda kiri dan roda kanan.
Memasang Jalur Catudaya
Jalur Catudaya untuk IC L293D

Jalur Catudaya untuk Motor
Memasang Jalur Kendali
Terakhir adalah memasang kabel-kabel jumper untuk jalur masukan pengendali motor.
Selamat mencoba!

0 komentar:
Posting Komentar